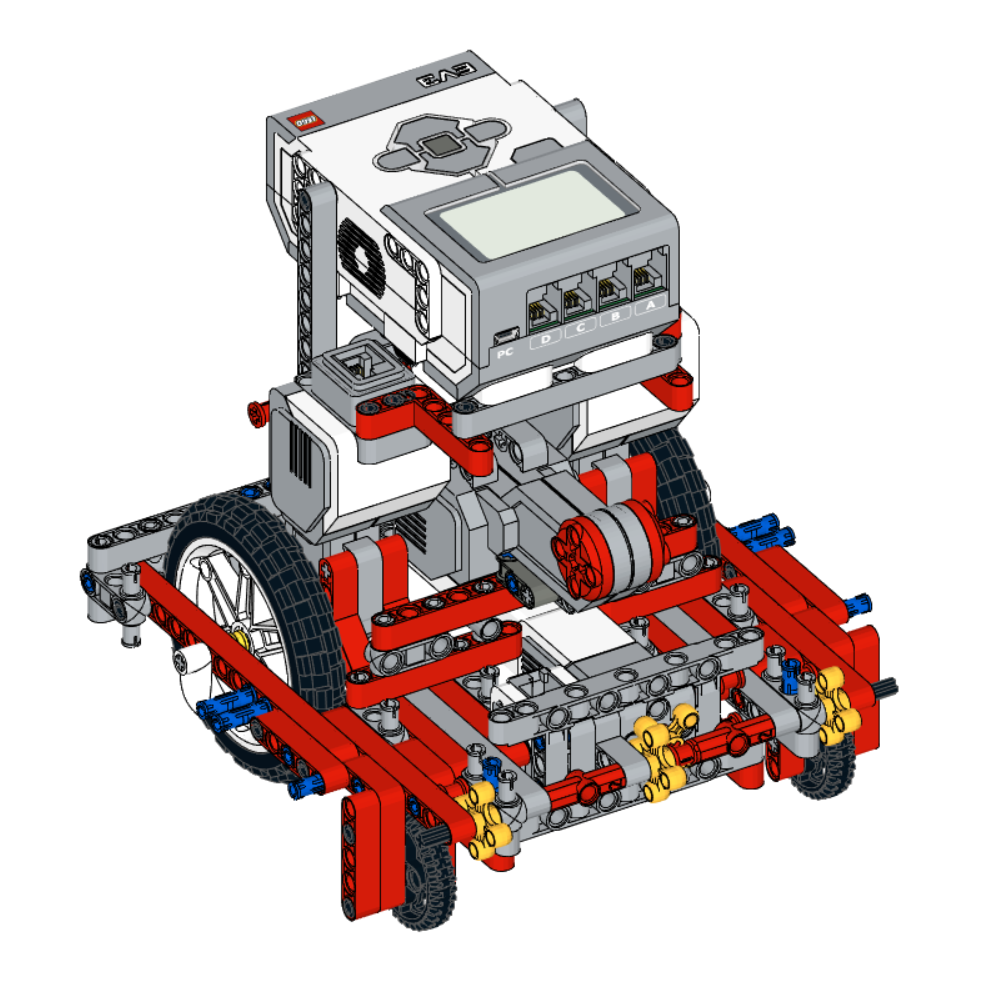
MOC-FLL求解机器人原型2
用于解决FLL挑战的机器人,如2017/2018年的流体动力学。这是第二个原型,视频展示了如何解决任务M13。在这里可以看到完整的播放列表。这个版本在几个方面比第一个原型有所改进:在EV3软件中驱动电机向前转动,转化为机器人的向前运动。脚印更小,更容易在垫子上导航。脚轮已经被锥齿轮取代,使直线行驶时的驾驶更加精确。M-马达现在直接连接到提升机构,从而更容易定位和复位。现在在下部提升组件上有两个提升插座。颜色传感器内置在机器人底座中,靠近机器人前部的中心,使编程一个线路跟随器变得容易。如何连接电机和传感器端口a:前M-电机。端口B:左XL-电机。端口C:右XL-电机。端口D:前XL-电机。端口1:颜色传感器。更新:乐高数码设计师(LDD)文件可用。Luders已经创建了这个机器人的LDD版本。可在此处获得:http://c-mt.dk/instructions/lxf/fll_prototype2.lxf























- by MOC大神#LasseD

 粤公网安备 44030602004624号
粤公网安备 44030602004624号