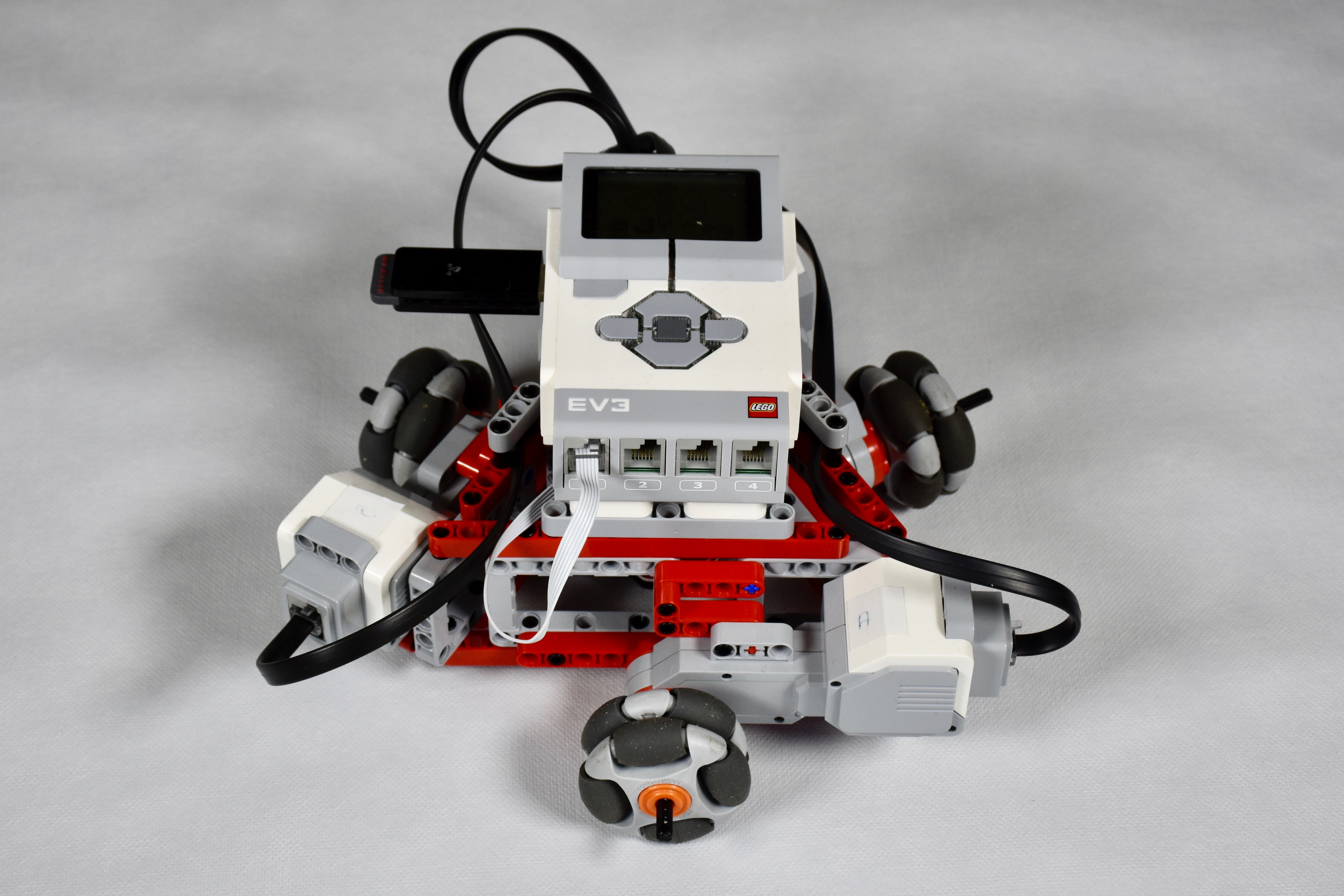
MOC-完整的乐高头脑风暴机器人
一个完整的机器人使用全方位的轮子来驱动和转向任何方向。轮子必须与机器人的中心对齐。我正在使用连接空间导航器按比例远程控制机器人。空间导航器按钮在绝对和相对控制模式之间切换。xa0在绝对模式下,空间导航器的前进方向映射到机器人的北方向。使用指南针传感器,机器人将始终向北行驶,无论是在哪个方向指向。在相对模式下,正向映射到机器人的正前方方向。z旋转控制机器人的旋转。软件和更多信息可在我的主页上找到。
零件清单(15)















- by MOC大神#bartneck

 粤公网安备 44030602004624号
粤公网安备 44030602004624号